本章将统一 MC 和 one-step TD.
7.1 $n$-step TD Prediction
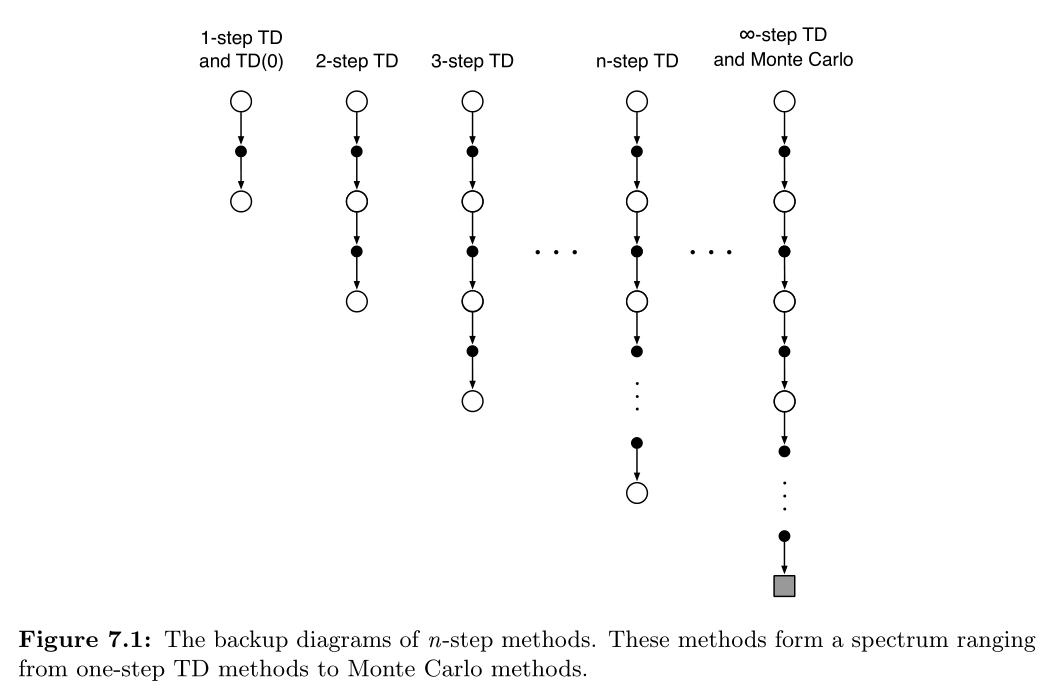
n-step TD 方法介于 MC 与 one-step TD 之间,使用一个 episode 中的多个立即奖励作为依据进行更新。
更新时使用的 target 是 n-step return:
简单的更新规则为:
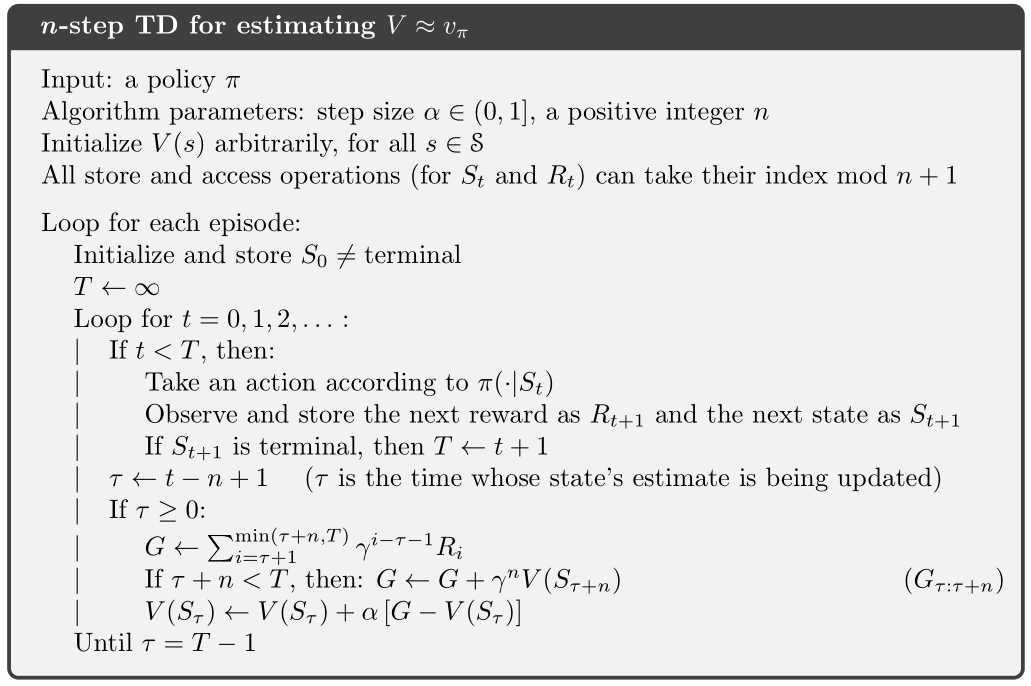
单纯的 n-step TD :
使用值函数 $V_{t+n-1}$ 来校正 $R_{t+n}$ 之后的奖励值。
可以保证的是,在最坏情形下,它们的期望值会比 $V_{t+n-1}$ 更贴近于 $v_\pi$.
这叫做 n-step returns 的 error reduction property .
由该特性,可以正式表明所有的 n-step TD 方法,在适当的技巧下,都能收敛到准确的预测。
由此可以得出一系列合理的方法,包括 one-step TD 与 MC 都是 n-step TD 的极端形式。
Example 7.1: n-step TD Methods on the Random Walk
假设第一个 episode 从 C 开始,一路向右经过 D,E,最后终结得到奖励 1.
回到那些开始于中间状态的估计值,$V(s)=0.5$.
对于 one-step TD,只有 $V(E)$ 会更新为 1,其余都不变。
而 two-step TD,就是 $V(D)=V(E)=1$. 如果是 3-step TD,则 C 的估计值也会变为 1.
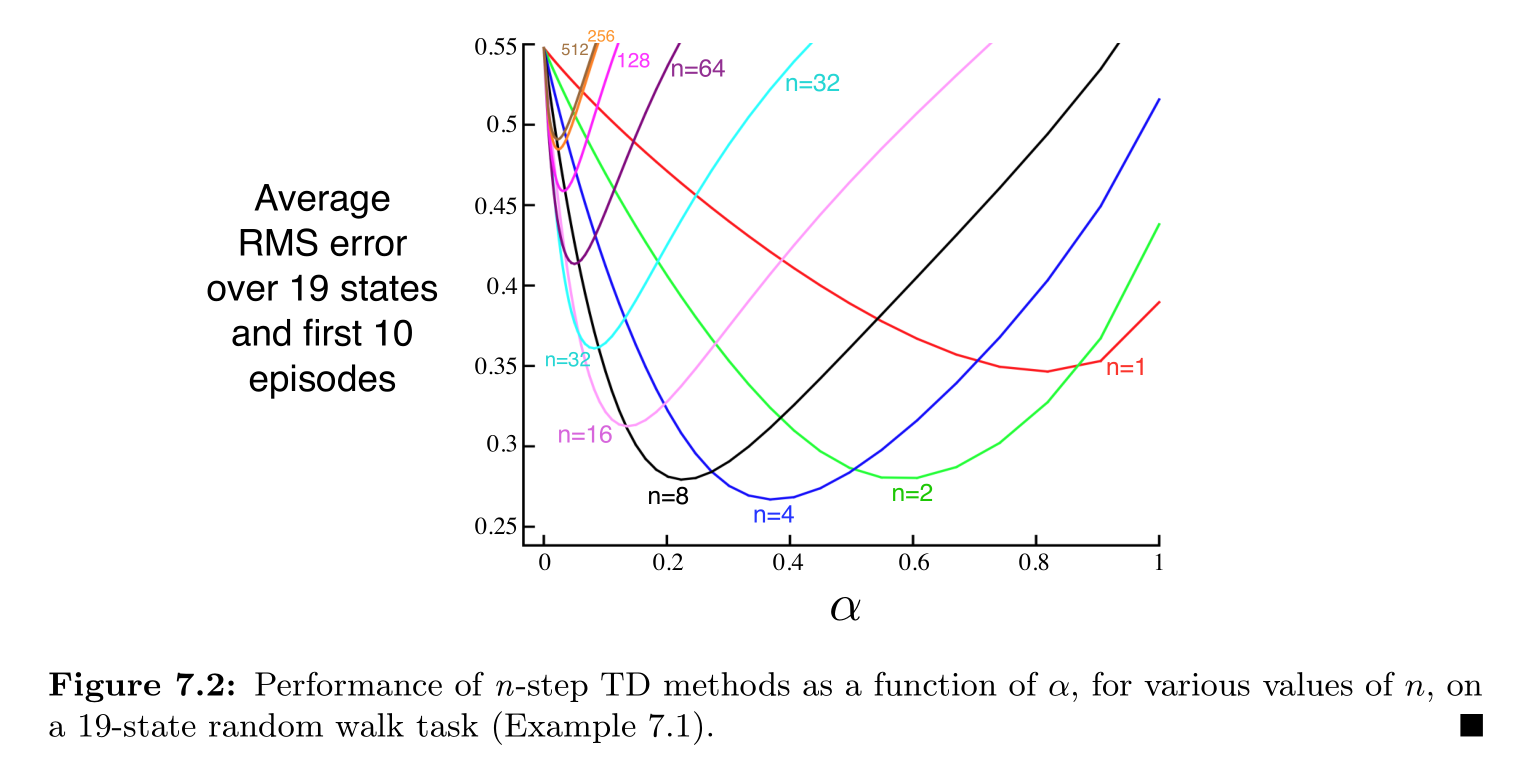
从上图可以看出,n 的值适中对性能的提升是巨大的,两种极端情况—MC 和 one-step TD 的性能都不是最佳的。
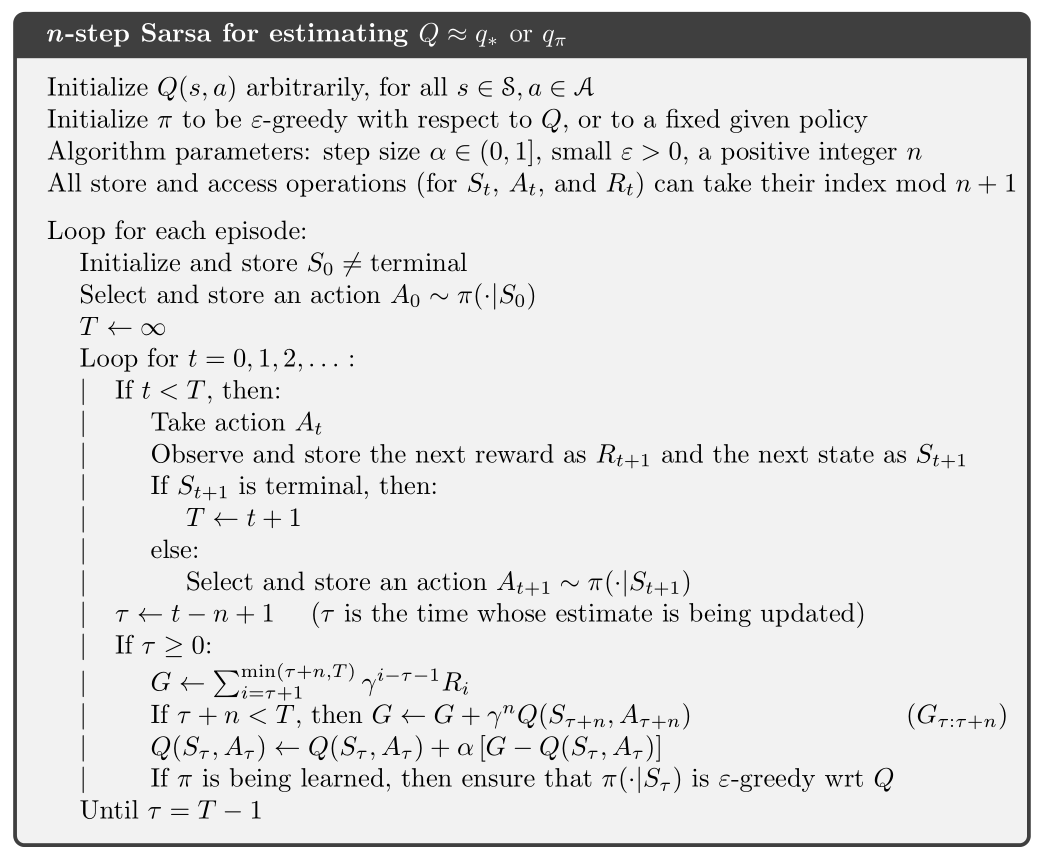
7.2 $n$-step Sarsa
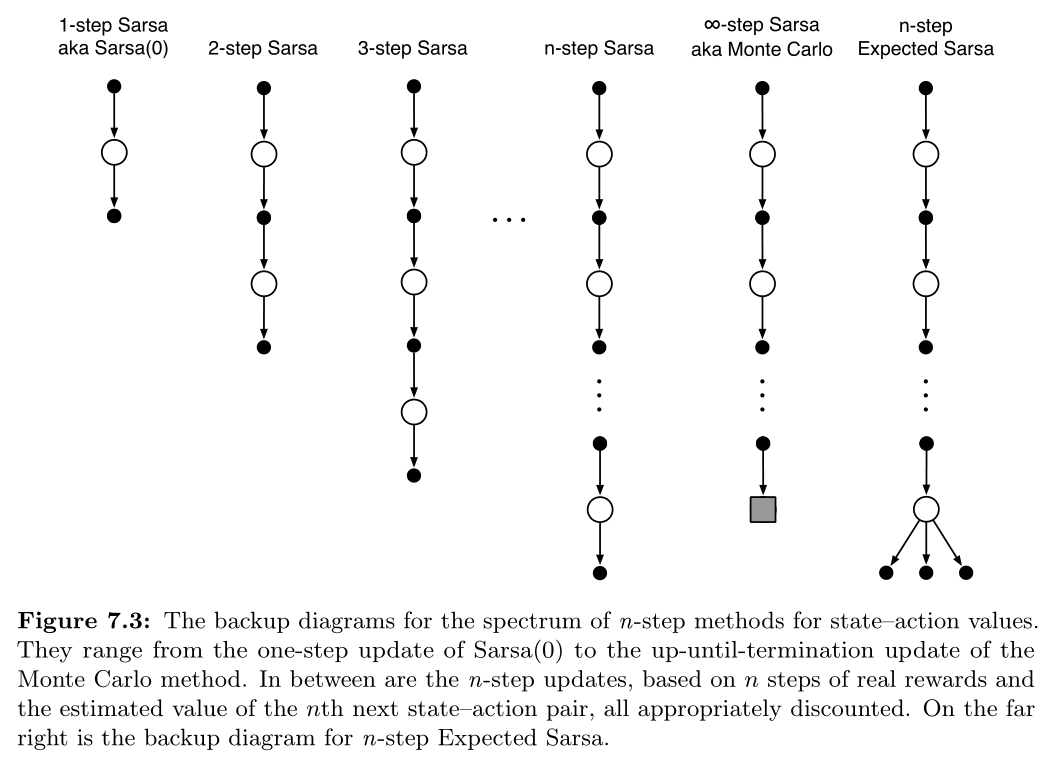
将 n-step 用到 Sarsa 的主要思想是:把 states 换成 actions(或 state-action pairs),然后使用一个 $\epsilon$-greedy policy.
backup diagram 与 n-step TD 没有多大区别:
n-step returns 也要重新定义一下:
更新规则:
伪代码:
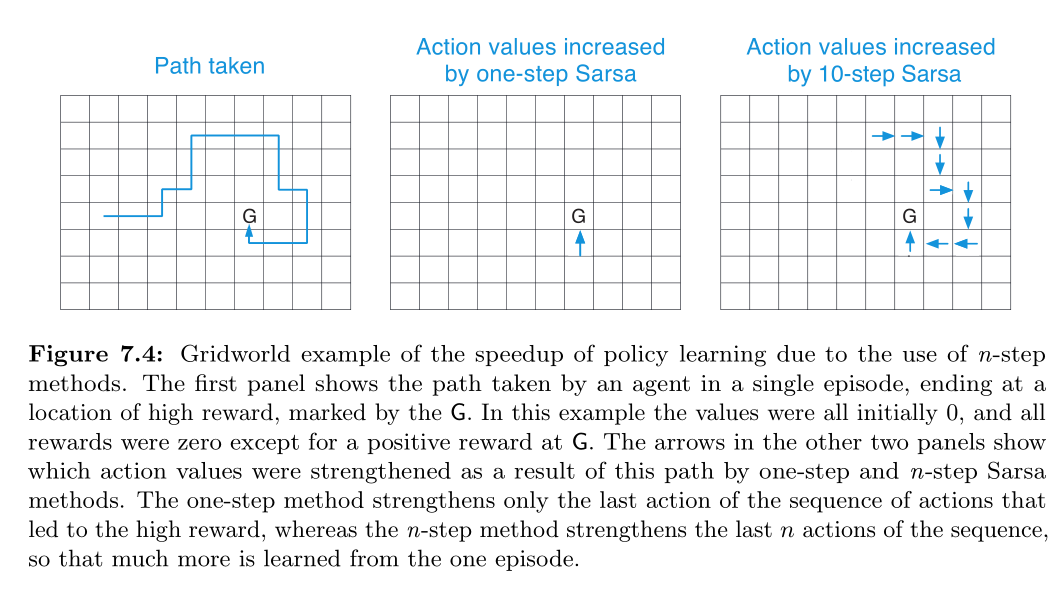
网格例子:
对于 Expected Sarsa,仅在最后将估计值替换为期望即可:
其中 $\bar V_t(s)$ 叫状态 s 的 expected approximate value,
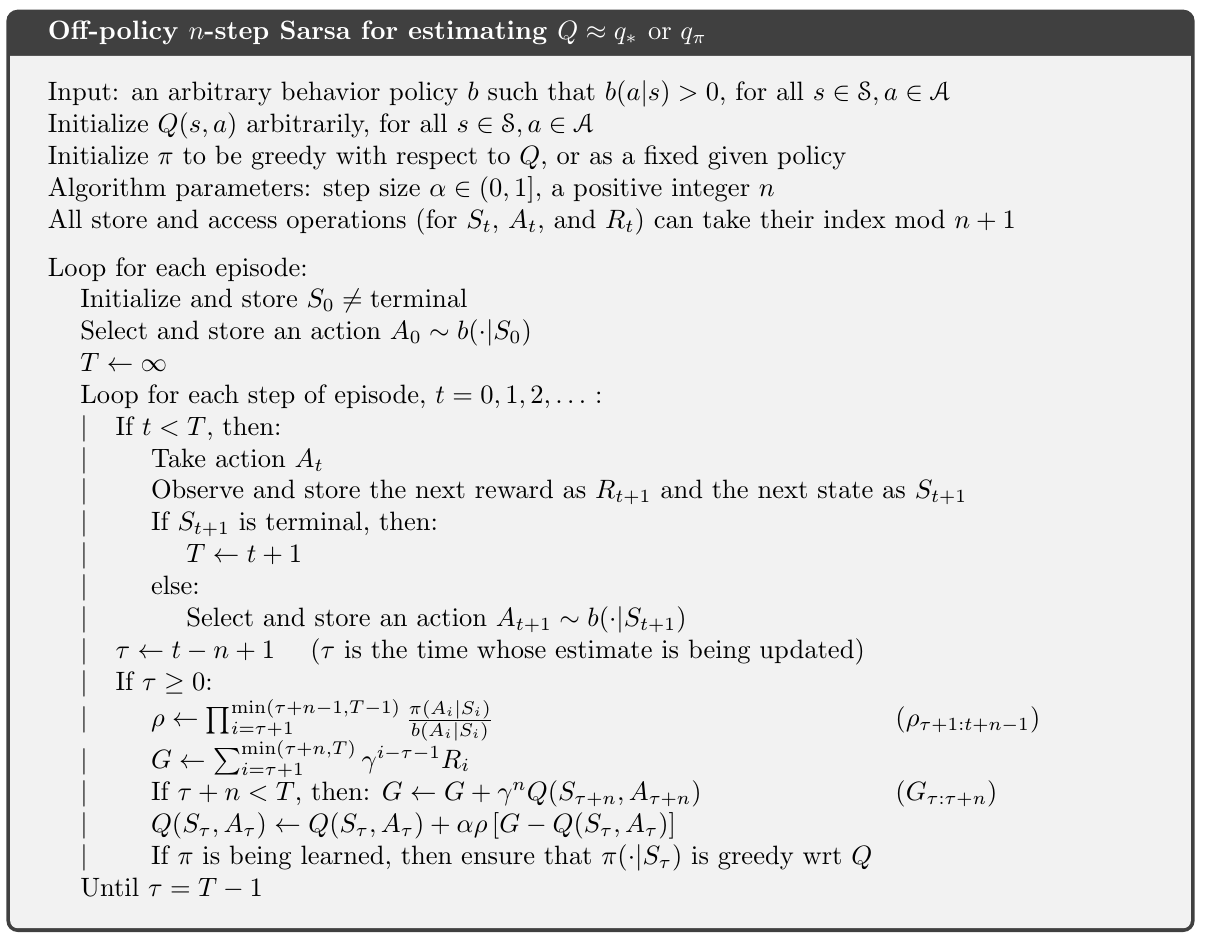
7.3 $n$-step Off-policy Learning
在 off-policy 方法中,关键还是两个不同策略的重要性采样系数 $\rho$ ,区别只在于它用了 n 个动作而已。
其中
而对于 使用 state-action value function 的算法,可以用同样的办法调整公式,使之变成 off-policy 方法。
这里有个小差别,就是 $\rho$ 的起止向后移了一步;这是因为在 t 时刻,我们已经选择了 $A_t$,那么后面就不需要关心 $A_t$ ,而关注于其后的 n 个动作。
对于 n-step Expected Sarsa 的 off-policy 版本,与 n-step Sarsa 类似,区别仅在于重要采样率会少一个参考量: $\rho_{t+1:t+n-1}$ 变成 $\rho_{t+1:t+n-2}$. 当然回报值也会变成期望版本。
7.4 *Per-decision Off-policy Methods with Control Variates
以上所介绍的 multi-step off-policy 方法简单明了,但效率并不高。
一种更为复杂的方法,使用了 per-decision importance sampling,就如在章节 5.9 介绍那样:
原始的 n-step 回报可以写做:
其中 $G_{h:h}\doteq V_{h-1}(S_h).$
当使用 off-policy 方法,即 行为策略 与 目标策略 不同时,需要添加权重 $\rho_t=\frac{\pi(A_t|S_t)}{b(A_s|S_t)}$.
最简单的方法就是直接在上式右侧乘上该权重,但是在某些情况下,比如 $\rho_t=0$ 也就是 目标策略 $\pi$ 选中该动作的概率为 0 时,$G_{t:h}$ 会整个变成 0.
当以这个 0 作为 target 更新值时,会带来非常大的变动,这和上一节的变化是不一样的。
可以用一个略微复杂的式子来对值进行更新,off-policy definition of the n-step return:
上式中多出来的部份叫做控制变量(control variate),它并不改变期望值,$\rho$ 的期望值是 1,且与估计值无关,所以控制变量的期望是 0.
另外,上式与 on-policy 的式子其实是一致的,即 $\rho_t$ 恒等于 1 时。
对于传统的 n-step 方法,与上式一起使用的学习规则是 n-step TD update (7.2),除了回报中内嵌的 $\rho$ 外,没有显式的重要性采样率。
对于 action values,因为第一个动作在重要采样中并不起作用,所以 n-step return 的 off-policy 定义有一点不同。
第一个动作是已经被学习到的,即便在目标策略下,它不会被选中也不会造成什么影响,因为它已经被选中了,其后的 reward 和 state 权重必然是 1,.
首先 action values 的 n-step on-policy return 的期望形式 $(7.7)$,可以递归地写作 $(7.12)$,除了 action values 外,递归以 $G_{h:h+}\doteq \bar V_{h-1}(S_h)$ 结束,就如 $(7.8)$ 里一样。
使用控制变量的 off-policy 形式为:
如果 $h<T$,那么递归以 $G_{h:h}\doteq Q_{h-1}(S_h,A_h)$ 结束;如果 $h\geq T$,那么递归以 $G_{T-1:h}\doteq R_T.$ 结束。
最终的预测算法与 Expected Sarsa 类似。
重要采样率能够带来合适的 off-policy 方法,但是也造成了更新的方差过高,以至于必须使用很小的 step-size parameter 从而导致学习速度变慢。
off-policy 比 on-policy 慢可能是无法避免的,但是它们的性能是可以提升的。
控制变量是降低方差的有效方式,另一种方法是使 step sizes 快速适应观察到的方差,比如 Autostep method (Mahmood,Sutton,Degris and Pilarski,2012).
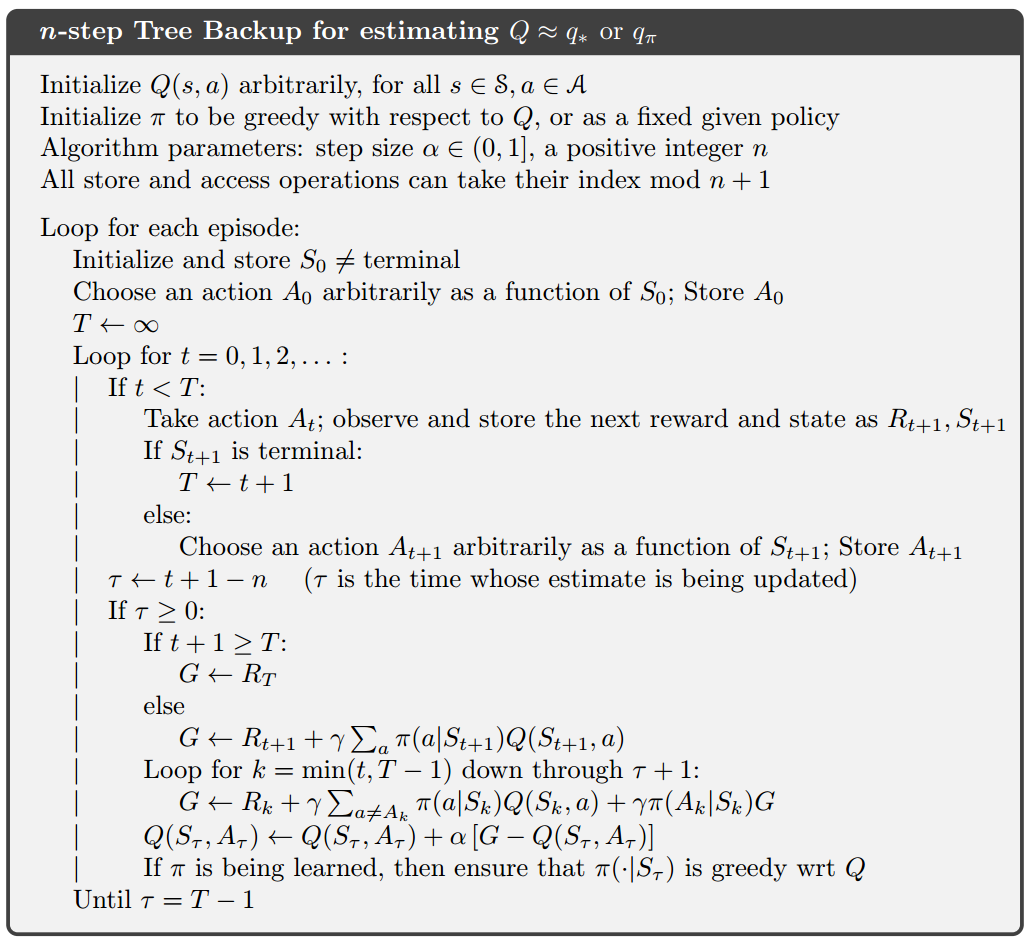
7.5 Off-policy Learning Without Importance Sampling: The $n$-step Tree Backup Algorithm
Tree-backup algorithm:
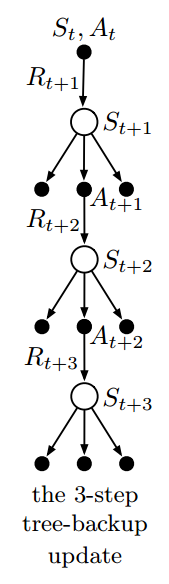
思想来于上图,之前的方法总是更新位于顶端节点的估计值(根据其下的奖励与底部节点的估计值),使其靠近 target.
而在 tree-backup update 中,target 包括了图中的所有东西,包括悬于两旁的未被选中的动作。
更细致地讲,更新来自于叶子节点的动作估计值。而中间的实际选中的动作,并未参与更新。
每个叶子节点根据它在策略 $\pi$ 中出现的概率来调整权重参与更新。因此第一层的动作 $a$ 按照 $\pi(a|S_{t+1})$ 的权重参与更新。
除了实际选中的动作 $A_{t+1}$ 以外,因为它的概率 $\pi(A_{t+1}|S_{t+1})$ 用在了第二层的动作值的权重。
因此,每个未选中的第二层动作 $a’$ 的权重为 $\pi(A_{t+1}|S_{t+1})\pi(a’|S_{t+2})$
而每个第三层的动作的权重为 $\pi(A_{t+1}|S_{t+1})\pi(A_{t+2}|S_{t+2})\pi(a’‘|S_{t+3})$,依此类推。
这就好像图中每个指向动作节点的箭头都是被加权的,权重就是在目标策略下选中该动作的概率,而如果在该动作下有一棵树,那么该权重就会作用到这棵树下得所有叶子节点。
接下来将这个 3-step tree-backup update 看做由 6 个 half-steps,交替进行:从一个动作到下个状态的采样,以及从该状态考虑所有可能的动作及其在该策略下发生的可能性。
公式化描述如下,首先 单步回报 是与 Expected Sarsa 相同的:
而 tree-backup 的 two-step return ($t<T-2$):
该回报作为 target 用于 n-step Sarsa 的更新:
7.6 *A Unifying Algorithm $n$-step $Q(\sigma)$
本章介绍了三种不同的 action-value 算法,如图 7.5 的前三种 backup diagrams 所示:
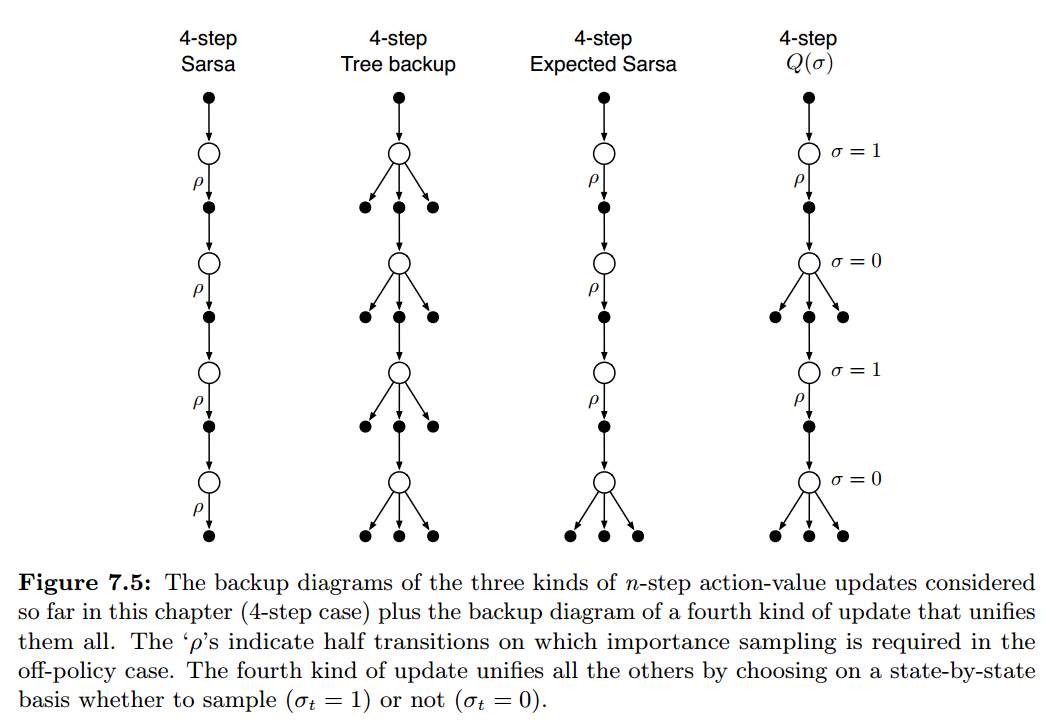
n-step Sarsa 有所有的转移样本;tree-backup algorithm 则不需要样本,因为它拥有 state-to-action 转移的所有分支;而 n-step Expected Sarsa 拥有最后一步的 state-to-action 带有期望值的完整分支,其它步则拥有转移样本。
将这些算法统一可以得到 $n$-step $Q(\sigma)$.
其思想是算法的每一步均独立决定使用所选动作作为样本,或是使用所有动作的期望。
如果都选前者便是 n-step Sarsa,都选后者就是 tree-backup algorithm,而 n-step Expected Sarsa 则是仅在最后一步选择后者,前面都选择前者。
可以用 $\sigma_t \in [0,1]$ 表示算法在 step t 采样的程度,$\sigma=1$ 表示完全采样,$\sigma=0$ 表示不采样。
随机变量 $\sigma_t$ 可以被设为在 time t 的关于 state、action 或者 state-action pair 的一个函数。
它与 7.4 中使用控制变量的 Sarsa 的 n-step return 是相似的,在这两者之间做线性变化:
用它作为 target 结合 $n$-step Sarsa 的更新方法,可以得到 $n$-step $Q(\sigma)$ 的算法:

7.7 Summary
本章介绍的时序差分方法是介于 one-step TD 和 MC 之间的。
所有的 n-step 方法均涉及到 n 步延迟更新。且相对于之前的方法,每一步所需要的计算量更大了。
相比于单步方法,n 步方法需要更大的内存,在 12 章,可以看到 multi-step TD 能够用最小的内存灵活地使用 eligibility traces 做增量计算,但是相比于单步方法还是会有额外的计算量。
虽然 n-step 方法比使用 eligibility traces 的方法更加复杂,但它们有一个很大的有点就是计算明了。
使用 重要采样率 的方法概念简单,但是变数较大,如果行为策略与目标策略差异较大,那就需要新的算法思想来使其更有效率,更实际一些。
使用 tree-backup 的方法 在 随机目标策略下 是从 Q-learning 到 multi-step 很自然的拓展。如果目标策略和行为策略差异较大,那么 在 n 比较大时,bootstrapping 可能只能跨越很少的 steps.