动态规划(dynamic programming, DP)指的是一类算法,该类算法用于在已知环境的完全模型的情况(比如 MDP )下,计算出最优策略
DP 在 RL 中应用有限,因为其要求有环境的完整模型,以及其计算量消耗巨大,但它依然是很重要的理论基础,有助于理解后续的方法
实际上,后面的方法可以看做是试图用更少的计算量,无需完全环境模型的方法,达到 DP 的效果
首先,假设环境是 finite MDP ,即状态、动作、奖励的空间是有限的
对于连续空间的问题,可以量化其三个空间,然后使用 finite-state DP
DP 的关键在于利用 值函数 来组织构造对优等策略的搜索
我们已知,如果有了满足贝尔曼最优方程的 $v_\ast$ 或 $q_\ast$ ,就能轻易地得到最优策略
DP 会把贝尔曼方程转化为逼近所求 值函数 的更新规则
4.1 Policy Evaluation (Prediction)
policy evaluation(prediction):如何为任意策略 $\pi$ 计算其 state-value function $v_\pi$
上一章我们给出了 $v_\pi$ 定义:
如果环境动态完全已知( $p$ 已知),那么上式就是 $|\mathcal S|$ 个未知数的 $|\mathcal S|$ 个非线性方程组
原则上,它的解是简单易算的
针对我们的目标,迭代解法更为合适
考虑一组估计值 $v_0,v_1,v_2,\dots,$ 每一个都是从 $\mathcal S_+$ 到 $\mathbb R$ 的映射,初始估计值 $v_0$ 随机选取,后续的估计值就能用上式作为更新规则来获得
在此更新规则中,$v_k=v_\pi$ 是固定的,而 $v_\pi$ 的贝尔曼方程保证了该例中的相等性
实际上,在相同条件下,序列 ${v_k}$ 在 $k\rightarrow \infty$ 时会收敛于 $v_\pi$
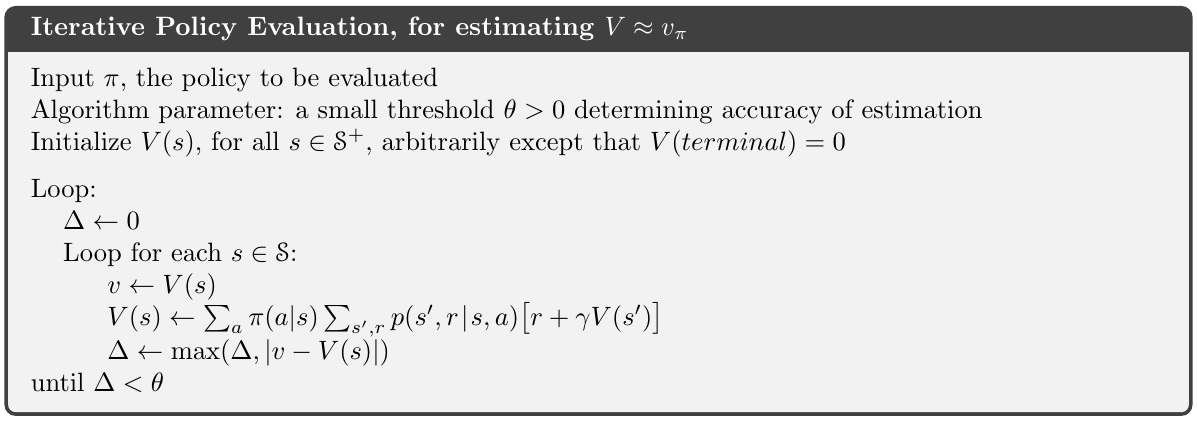
该算法称为迭代策略估计(iterative policy evaluation)
算法对每个状态 $s$ 执行相同的操作,来从 $v_k$ 得到 $v_{k+1}$
它使用旧的 values 的后续状态,和当前策略的所有可能的单步转移所得的期望立即奖励,来得到一个新的 value ,并以新的替换旧的
这种操作称为 expected update
每一次的迭代都会把所有的状态的值都更新一遍,来得到一个新的逼近值函数 $v_{k+1}$
DP 的更新称作期望更新,是因为它是基于所有可能的后一状态的值的期望,而不是仅基于后一状态的一个采样
编程实现以上的迭代策略估计时,会用到两个数组,一个用于存放 old values $v_k(s)$ ,另一个存放 new values $v_{k+1}(s)$
使用两个数组,能在 old values 不变的情况下,更新 new values
如果只用一个数组,在原地将 old values 更新为 new values,那么有些部分就会用 new values 代替 old values 作为更新依据,这也能让算法收敛于 $v_\pi$; 事实上,这样做的收敛速度会快于使用两个数组,因为它一得到最新数据就把它用来更新
我们把这更新看做在状态空间中的 sweep ,对于原地更新算法,更新时候的状态顺序会对收敛速度起到很大的影响
我们在考虑 DP 算法时通常会使用 原地更新
一个完整的迭代策略估计的原地更新算法如下
理论上讲,算法只会在无穷远处收敛,然后停止迭代
我们在实践中,会在每次 sweep 后检查 $\max_{s\in \mathcal S}|v_{k+1}(s)-v_k(s)|$ ,当它足够小时,就停止迭代
Example 4.1
一个 $4\times 4$ gridworld:
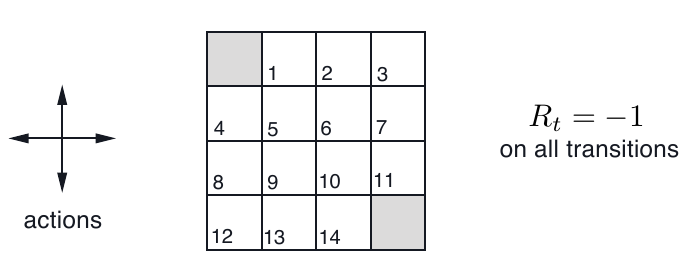
图中,阴影的两块位置为 terminal state (虽然有两块,但只表示一个状态)
所有的状态转移所得到的 reward 均为 -1
也就是说,无论 agent 怎么行动,都会得到 -1 的 reward ,直到它到达 terminal state
不过要注意,在格子的边缘,如果走向离开格子世界的地方,就会保持在原地不动,同时得到 -1 的 reward
比如, $p(7,-1\mid 7,right)=1$, 表示在格子 7 向右走,下一个格子是 7 ,得到 reward -1 的概率为 1
所以 agent 的学习目标就是尽快到达 terminal state
下图是该例的迭代策略估计的更新过程:
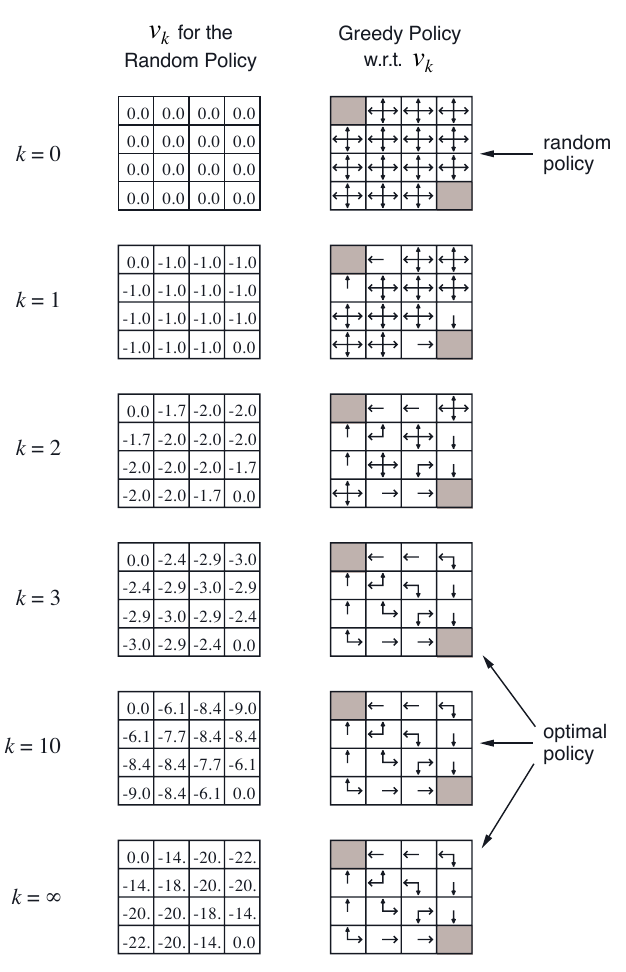
这里,$k=3$ 时,位置 6,9 之所以不走向 2,7,8,13 的原因是,走向它们会使得 agent 有更多的可能进行 “出格” 的行动,而走出格子世界会使得状态不变而奖励 -1 ,这相当于在做负功
更新过程中,始终用的是等概率策略,右边显示的 greedy policy 并不是在更新过程中使用的 policy
Exercise
4.1:
4.2:
待做
4.3:
4.2 Policy Improvement
计算 值函数 是为了找到更好的 policy
假设我们对一个随机的确定性策略 $\pi$ 确定了其 值函数
在某些状态 $s$ 时,我们会想知道是否应该去选择由策略所得到的那个 action,转而选择一个 action $a\neq \pi(s)$
我们现在知道,在 $s$ 使用当前策略有多好—$v_\pi(s)$ ,但改变策略会不会得到更好的结果呢?
我们可以试着去选择这个 $a\neq \pi(s)$
关键在于这个值与 $v_\pi(s)$ 的大小关系
如果 $q_\pi(s,a) > v_\pi(s)$ ,那么我们不只希望这一次选择这个 action ,还希望在未来遇到这个 $s$ 的时候,依然会选择这个 action a
policy improvement theorem.: $q_\pi(s,\pi’(s)) > v_\pi(s).\quad \text{for all } s\in \mathcal S$
表明策略 $\pi’$ 优于策略 $\pi$: $v_{\pi’}(s) > v_\pi(s).\quad \text{for all } s\in \mathcal S$
照下式更新策略,即可使得新的策略不差于原始的策略,这就是 policy improvement:
当新的策略与旧的策略相同时,就说明其收敛;且根据贝尔曼最优方程,其必然是最优策略
policy improvement 会给我们一个优于原策略的新策略,除非原策略已经是最优策略
在更新过程中,如果旧的贪婪策略中有多个 greedy action ,那么在新的贪婪策略中,可以为他们分配相同的概率,而不是随机选一个
4.3 Policy Iteration
在用 $v_\pi$ 优化原策略得到新策略 $\pi’$ 后,就可以用新策略来计算新的值函数 $v_{\pi’}$ ,然后,继续优化:
其中 $\stackrel{E}{\longrightarrow}$ 表示 policy evaluation,而 $\stackrel{I}{\longrightarrow}$ 表示 policy improvement
finite MDP 有 finite policies,从而该过程在 有限次迭代 后会收敛于 最优策略 和 最优值函数
以上称为 policy iteration,其完整算法如下
起始的策略对迭代的收敛速度有较大的影响
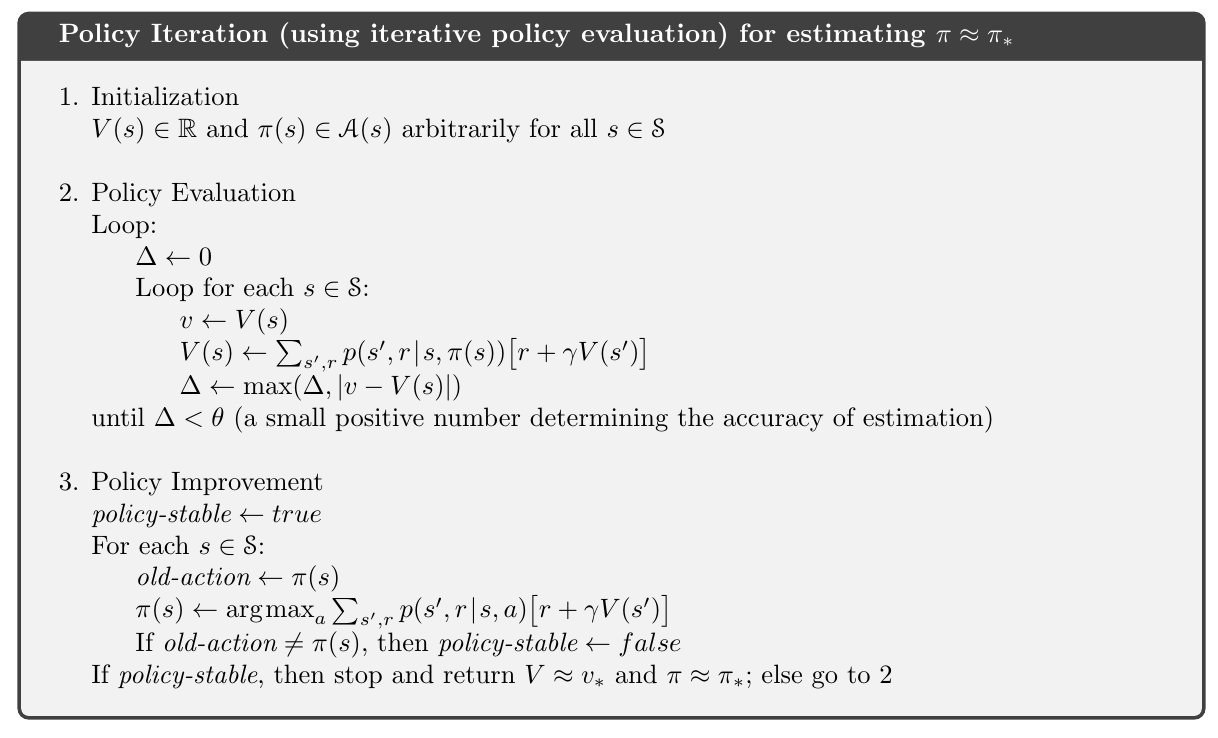
策略迭代经常会非常快地收敛
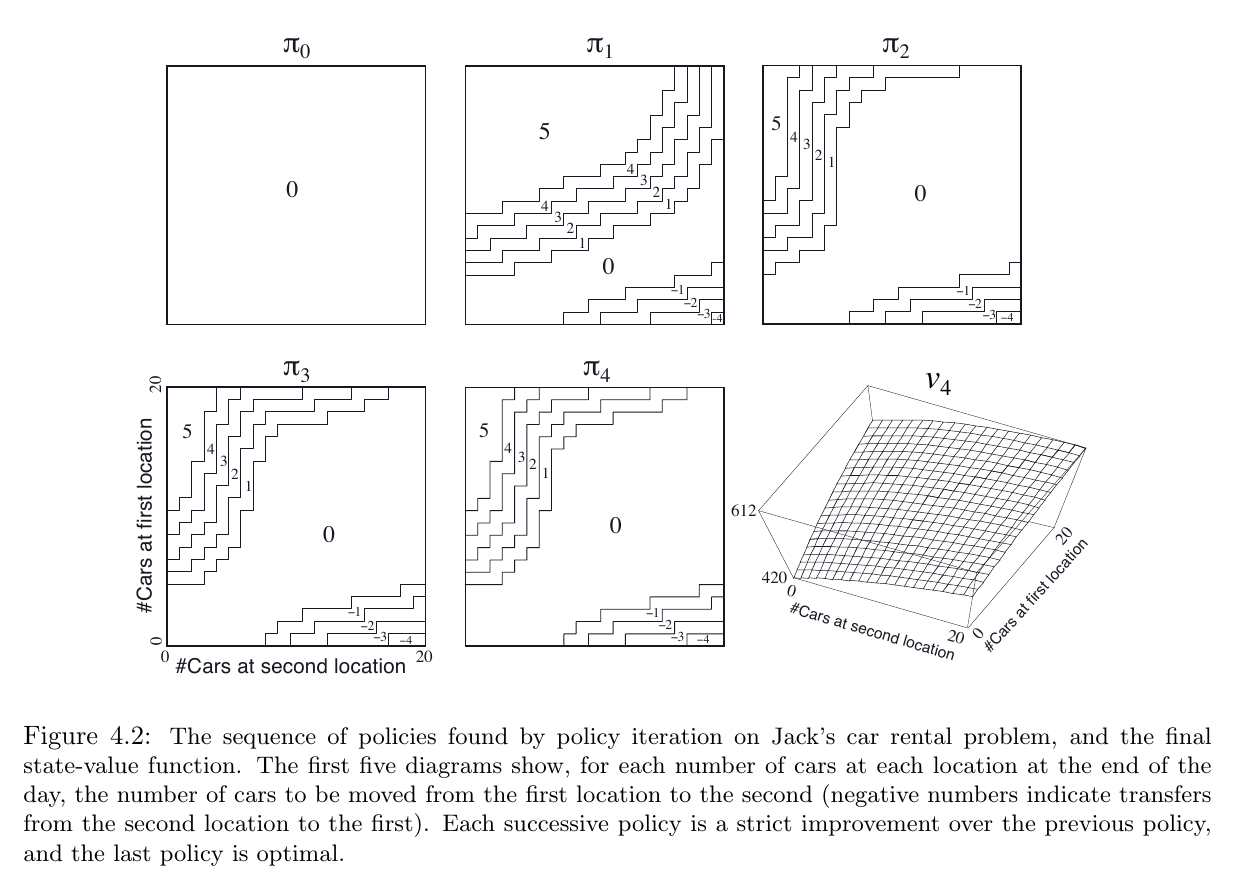
Example 4.2: Jack’s Car Rental
一个出租车公司,有两个出租点,每租出一辆车收获 10 ,如果出租点没有车,交易失败,可以在两个出租点之间调整车辆,每移动一辆车耗费 2
假设 租车需求 和 还车数 都是随机变量(泊松分布), 即取值为 n 的概率是 $\frac{\lambda^n}{n!}e^{-\lambda}$ ,此处 $\lambda$ 是期望值。 设两个出租点的 出租需求 的期望 $\lambda$ 分别为 3 和 4;还车数 的期望 $\lambda$ 分别为 3 和 2 ,假设每个点的车辆数目不超过20,超过的部分会消失; 每次移动车辆最多 5 辆
将该问题视作 continuing finite MDP, time step 为每天,$\gamma=0.9$ ;state 为每天结束时两个点的车辆数,action 为每晚移动车辆的数目
下图显示了 $\pi$ 的变化, 是一个矩阵,矩阵各区域的取值显示在图上
Exercise
4.4:
限制迭代轮次??
4.5-4.7:
先跳过
4.4 Value Iteration
policy iteraion 的缺点之一:每轮迭代都有 policy evaluation ,它本身就是一个较长的迭代过程,需要多次 sweep 计算
如果 policy evaluation 是迭代完成的,那么只有在极限处才会 完全收敛至 $v_\pi$
可以截短 policy evaluation :
在保证 policy iteration 能够收敛的情况下,有多种方法截短 policy evaluation
一个重要且特殊的算法 value iteration:在 evaluation 进行了一次 sweep (每个 state 都更新过一遍) 后立刻停止
policy improvement 和 截短的 policy evaluation 的单步结合可以写作:
如何理解:1.贝尔曼最优方程 的更新规则表达;2.树状图 (policy evaluation && value iteation)
迭代终止:理论上会在 有限次数 迭代后 收敛至 $v_\ast$ ;实践中,与 policy evaluation 一样,在某次 sweep 后,如果 value function 的变化小于某个预设值,即可停止;完整算法如下:
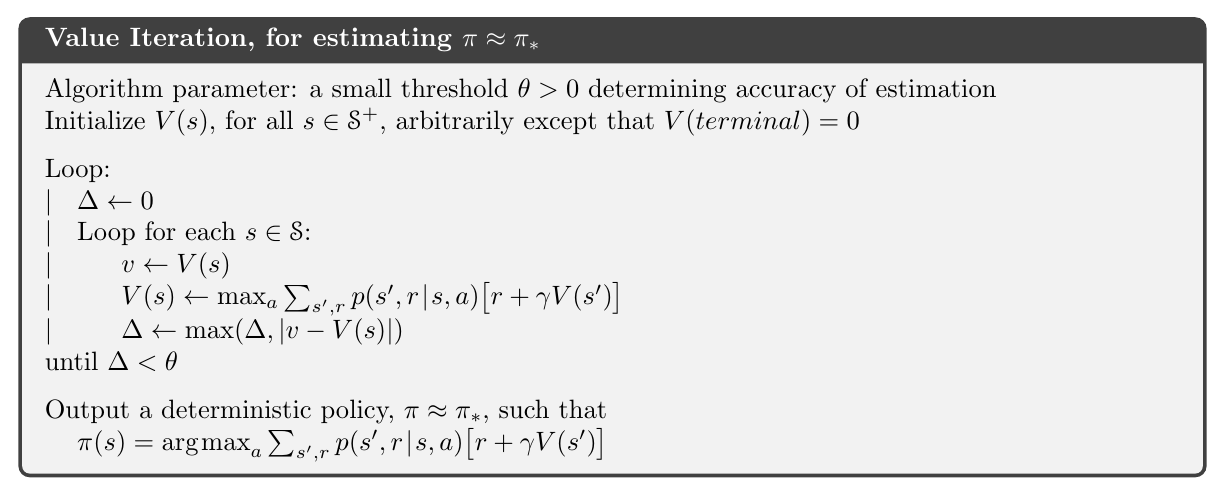
value iteration 在一个 sweep 中有效结合了: policy evaluation 和 policy improvement
很多时候,在每个 policy improvement sweep 中插入多个 policy evaluation sweeps 能够带来更快的收敛
一般来说,整类 截短 policy iteration 方法可以看做是 考虑不同序列的 sweeps 组合,哪些用 policy evaluation updates,哪些用 value iteration updates
这两种 updates 之间的差别在于公式中的 $\max_a$ ;这意味着,我们是在 某些 policy evaluation sweeps 中加入了这个 $\max_a$
在 discounted finite MDPs 中,这些算法总是能收敛到一个 最优策略
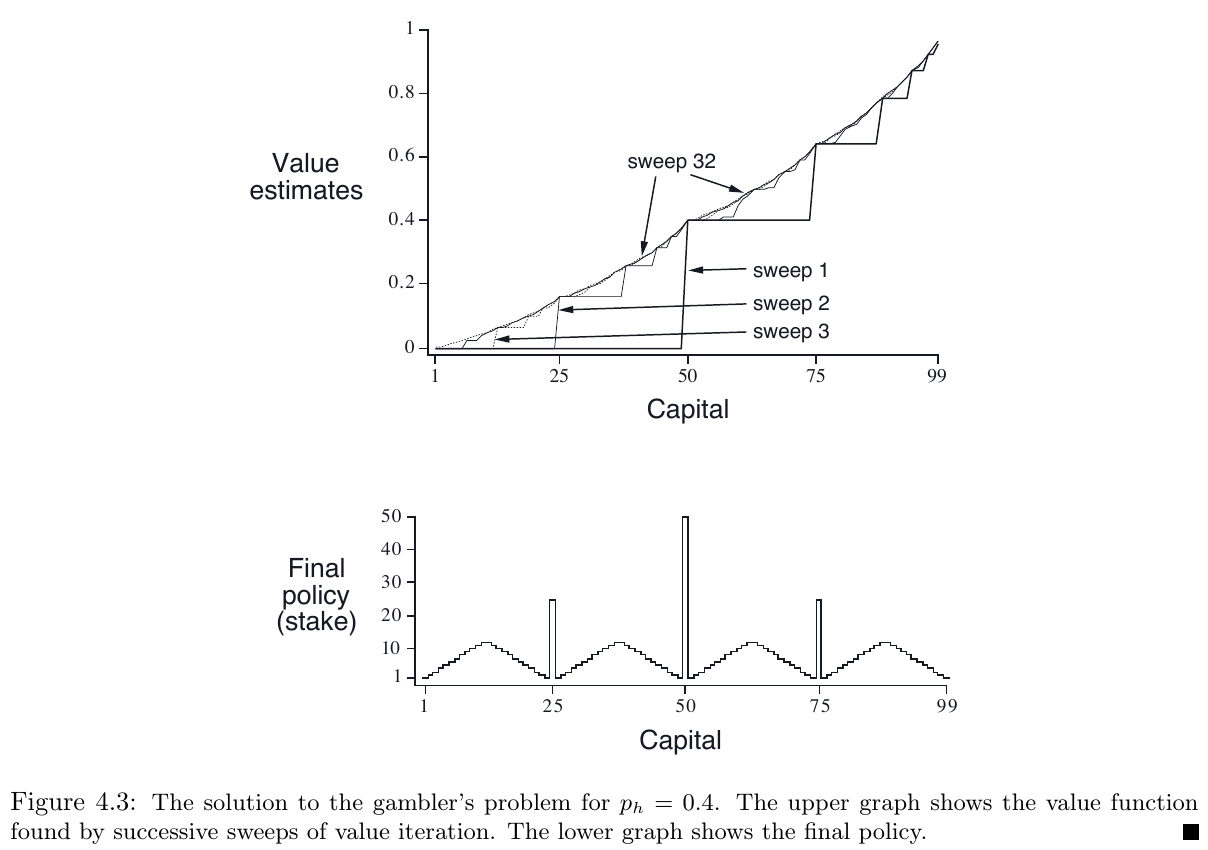
Example 4.3: Gambler’s Problem
一个赌徒玩猜硬币:人头向上则赌注翻倍,人头向下则赌注没收;本钱达到 100 或 0 则游戏结束;赌徒所做的抉择是,每次丢硬币前押多少本钱
该问题可以形式化为一个 无折扣的、周期式的、有限马尔科夫决策过程
state: 赌徒的本钱数量: $s\in\lbrace1,2,\dots , 99\rbrace$
actions:每次赌注数目: $a\in \lbrace 0,1,\dots,\min(s,100-s)\rbrace$
reward: 除了获胜(本钱达到 100)时为 +1 外,其余的状态转移均为 0
state-value function: 当前 state 的获胜概率
policy: 本钱 $\rightarrow$ 赌注 的映射
设 $p_h$ 为硬币人头向上的概率,如果 $p_h$ 已知,那么整个问题就是已知的,就能够解决了,比如用 value iteration
下图显示了 value function 随 value iteration 的连续 sweep 的变化情况,以及最后找到的 policy ,其 $p_h=0,.4$
该策略最优,但不是唯一的;实际上,有一组最优策略,它们关于与 最优值函数 的 argmax action 的选择方式有关联
Exercise
4.9-4.10:
先跳过
4.5 Asynchronous Dynamic Programming
DP 需要遍历 MDP 的整个状态集,如果状态集很大的话,一次 sweep 就难如登天了
backgammon 就有超过 $10^{20}$ 个状态,即便我们能在一秒内 计算 100万 状态的 value iteration ,一个完整的 sweep 也将耗费超过一千年的时间
Asynchronous DP 是一种 原地 迭代的 DP 算法,不对状态集进行系统的 sweeps
异步DP 使用任意可用状态的 value,以任意顺序 更新 状态的 values
可能有些状态被更新了许多次,而某些状态只被更新一次
为了能够收敛,异步DP 要持续更新所有的状态,并不会在某些情况下忽略任意状态的计算
异步DP 在选择更新的状态上有很高的灵活性
举个例子:
asynchronous value iteration:在每个 step $k$ ,只更新一个状态 $s_k$
如果 $0 \leq \gamma < 1$ ,保证在无穷的时间序列 ${s_k}$ 中出现过所有的状态下,能够让算法逐渐趋近 $v_\ast$
在一些 undiscounted episodic case 中,有一些更新顺序会导致算法无法收敛,但这很容易避免
类似地,可以混合策略评估和值迭代更新以产生一种异步截断的策略迭代
虽然这个和其他更不寻常的DP算法的细节超出了本书的范围,但很明显,一些不同的更新形成了可以在各种无扫描DP算法中灵活使用的构建块
避免 sweeps 比不意味着能够减少计算量
它只能让算法在优化 policy 之前,无需锁定在任何 无用冗长的 sweep 上
利用选择更新状态的灵活性,可以加快算法的更新速率
可以通过调整更新顺序,使得状态转移时的信息传递更有效率
有些状态可能并不需要很多的更新,有时我们会完全跳过某些状态的更新,因为它们与最优动作无关,在 Chapter 8 中讨论
异步算法使得在实时交互中混入计算过程变得容易
可以在 agent 实际经历 MDP 的同时运行迭代 DP 算法
agent 的经历用于决定 DP 算法更新哪些状态
同时,DP 算法的最新 value 和 policy 可以指导 agent 的决策
比如,可以在 agent 访问到时 才提供状态的更新;这使得 DP 算法关注更新的状态与 agent 的行为密切相关
这种 focusing 是 RL 中一个被不断讨论的主题
4.6 Generalized Policy Iteration
policy iteration 同时包含了两个交互过程:
- policy evaluation: 使 value function 对应当前的 policy
- policy improvement: 使 policy 为当前 value function 的 greedy 选择
在 policy iteration 中,它们是交替进行的,这不是必要的
在 value iteration 中, 两次 policy improvement 之间只执行一次 policy evaluation
而在 异步 DP 中,两者以更加精细的方式交错,在某些时候仅仅更新了一个状态就转头去进行另一个更新
只要这两个过程持续更新所有的状态,最终结果是一样的,那就是收敛于 最优值函数 和 最优策略
generalized policy iteration (GPI) :evaluation 与 improvement 的交互,不论两者交错的粒度或其它的细节
几乎所有的 RL 方法都能用 GPI 来描述
它们都有可识别的 policies 和 value functions; evaluation 总是会给出当前 policy 对应的 value function; improvement 总是会利用其 value function 优化当前的 policy
当它们不再变化时,表明达到了最优;即当前的 policy 已经无可优化,且当前的 value fucntion 已经对应了当前的 policy
这就是贝尔曼最优方程所表达的
在 GPI 中,evaluation 和 improvement 可以看做是矛盾双方,在竞争中协调进步
evaluation 要使 value function 对应于当前的 policy
improvement 要使 policy 优于 当前 value function 对应的那个 policy,就会使得 value function 与 policy 再次不对应
总而言之, GPI 的两个过程会把算法带向最优,只要这个最优是存在的
4.7 Efficiency of Dynamic Programming
DP 在较大的问题上不实用,但相比其它解决 MDPs 的方法,DP 的效率很高
DP 找到 最优策略的的时间是关于 状态空间 $n$ 和 动作空间的 $k$ 的多项式
这大大优于直接搜索策略空间 (大小约为 $k^n$ )的那些方法
线性规划也能用于 解决 MDPs,且在某些情况下其收敛性能比 DP 要好,但是它能适应的问题大小比 DP 小得多 (差距大约 100倍)
对于那些最大的问题,只有 DP 是可行的
由于维度灾难(curse of dimensionality),DP 有时被认为有巨大的应用限制
实际上,这不是 DP 不好用,而是其面临的问题难度太大,DP 已经比暴力搜索、线性规划好得多了
现如今的计算机,已经能用 DP 解决具有 百万状态的 MDPs
policy iteration 和 value iteration 都被广泛应用,不能说哪一个会更好
如果有一个不错的初始 value function 和 policy ,那么它们的收敛速度还是很可观的
对于状态空间较大的问题,常使用 异步DP
用同步方法对每个状态完成一次 sweep 需要的计算和内存太大
在某些问题中,虽然其所需的计算和内存不能满足,但也能解决问题,是因为在通往最优方案的路径中,所涉及的 状态 要比其状态空间小得多
4.8 Summary
学习了解决 finite MDPs 的 DP 算法
policy evaluation 用于计算一个 给定 policy 对应的 value function
policy improvement 用于在 给定 policy 及其对应的 value function 的基础上,计算更优的 policy
两者结合,就有了 policy iteration 和 value iteration 这两个 DP 方法
它们都可用于计算一个完全已知 MDP 的 finite MDPs 的 最优值函数 和 最优策略
经典 DP 方法针对 状态集 做 sweep,对所有的 state 做 期望更新
期望更新 与 贝尔曼方程的联系更紧,它用到了 当前状态的所有可能后续状态 的期望变化情况
当 更新 不再带来变化时,算法收敛,满足贝尔曼方程
GPI 是对 DP 中两个过程之间的交互关系 表达,忽略了交错的细节
bootstrapping:在某些估计值的基础上,更新原有的估计值;用多次抽样来回归母本分布
因为 DP 是需要环境的完全模型的,但这一点很难实现,所以用 bootstrapping 来模拟
下一章将讨论 不需要模型且不用 bootstrapping 的方法
后面的章节将讨论 不需要模型但是使用了 bootstrapping 的方法