区分强化学习与其它机器学习方法的最重要特征:用 评价动作选择的训练信息(用 policy 来选择动作,强化学习会评价所选择的动作的好坏) 来取代 直接给出正确动作的指导信息 (由外部直接给定正确的动作) 。为了明确搜索好的行为,强化学习需要积极地探索。单纯的评价性反馈指出采取的动作有多好,而不是说哪个动作最好或哪个最差;而单纯的指导性反馈恰恰相反,其指出应该采取的正确动作。在这种单纯的形式上,这两种反馈有明显不同,评价性反馈完全依赖于动作的选取,而指导性反馈则完全独立于动作的选取。
这一章在一种简单的环境下(不超过一种situation, 选择 action 时不用考虑 state ,因为 state 是始终不变的常量)学习评价方面的RL,这种无关联环境中,评价性反馈所涉及的前置工作已经完成,避免了完整的RL问题中的许多复杂情况。学习这个例子,能够清楚地了解评价性反馈是如何区别于指导性反馈,以及如何与其相结合。
这章使用的无关联、评价性反馈问题是 k-armed bandit proble 的一种简单版本,用它来引入一系列基本学习方法,并在后续章节中扩展他们以应用于完整的RL问题。在本章的最后,通过讨论 bandit 问题变成 associative ,即 situation 多于一种的情况下的RL问题。
2.1 A k-armed Bandit Problem
所谓 Bandit Problem ,就是指要在一个动作空间中做出选择,然后该选择将会决定获得的奖励的多少,在不停的做选择并得到奖励回馈中不断优化选择策略。
此处的问题中,需要在k个不同选项中重复地做选择,每次选择后会得到一个数值奖励,其出自一个依赖于所做选择的统计概率分布,目标是在经过一段时间(如1000次选择或一段实际的时间)让总奖励的期望最大化。
在该问题中,每个 action 都有一个期望或平均奖励,称为该 action 的 value (这里的 value 与后面的 value function 有所不同,在这个问题中,action 不会影响到后续 states 的变化,因此 action 只对立即奖励有影响,而对长期累计奖励没有影响,而后面讨论到的问题没有这么简单)。将在 time step $t$ 做的选择定为 $A_t$,其对应的奖励值为 $R_t$,对任一 action $a$,定义 $q_\ast (a)$ 为 $a$ 的期望奖励:
由于 $q_\ast (a)$ 不完全可知,定义 estimated value of action 为 $Q_t(a)$,目标是让 $Q_t(a)$ 靠近 $q_\ast (a)$
这里的 $q_\ast (a)$ 的定义是针对 Bandit Problem 的,每次的选择不会影响到后面的情况,因此只要考虑即时 reward
当我们保存下这些 estimates of the action values ,在某些 time step 中,我们能够找到 value 最高的 action ,它们称为 greedy action ,如果我们选择这些action,就叫做 exploiting ;反之,当我们选择那些不是 greedy actions 的 action 时,称作 exploring ,这能优化那些 non-greedy action 的 value ,这主要依赖于后续的未知变化。
在任意确定案例中, explore 和 exploit 哪个好是一件很复杂的事情,其取决于估计的精确值,不确定性及剩余步数。在 bandit problems 和其它相关问题中,能够用特定的数学表达来得到许多精妙的方法来平衡这两者,但是这些方法大都对平稳和先验做了强假设,它们都不能实际应用在完全的RL问题中,当这些理论假设不成立时,这些方法的优化和有限损失的保证均不靠谱。
2.2 Action-value Methods
对 action-value 的估计可以简单地表示为:
分子为在 $t$ 时刻前所有选择 action $a$ 所获得的 rewards 之和,分母为在 $t$ 时刻前选择 action $a$ 的总次数。
$Q_t(a)$ 表示选择一次 action $a$ 所获得的平均 reward 。特别地,当分母为0时,可以定义 $Q_t(a)$ 为0.
当分母趋于无穷时,根据大数定理,$Q_t(a)$ 趋于 $q_\ast (a)$ ,该方法称为 sample-average technique
最简单的 action 选取规则就是选择拥有最高 estimated value 的那个 action ,当有多个 actions 拥有最高 estimated value 时,任意选择其中一个即可,即:
该方法是完全 exploit ,不进行 explore ,一个简单的改进是引入一个概率值 $\epsilon$,来使选取策略以一定概率进行 explore ,即不再选择拥有最高 estimated value 的 action ,而是随机选取 action ,这称为 $\epsilon$-greedy methods 。该方法的优势在于,随着 steps 的增加,每个 action 总会有机会被选中,使得 $Q_t(a)$ 整体上趋于 $q_\ast (a)$
Exercise:
2.1:
- $50\%$
2.2:Bandit example:
- A2、A5肯定是 ε case ,因为在A2以前, action 2 没有被选择过,其Q值为0,而 action 1 的Q值已经非0,当时的 greedy action 应该是 action 1 ,所以 action 2 肯定不是 greedy action ,A5同理;A1、A3有可能是 ε case ,在 time step 3 , greedy action 应该是 action 1 以及 action 2 ,按照对 greedy action 的选取策略,如果是随机选中到了 action 1 , 那么A3就是 ε case ,如果是选中了 action 2 ,那么A3就不是 ε case ,A1与其类似。
2.3 The 10-armed Testbed
粗略评估 greedy 和 ε-greedy 的效率差异:
10-armed testbed :2000次随机生成的 10-armed bandit problem ,每一次都以标准高斯分布选取10个 $q_\ast (a)$,如下图:
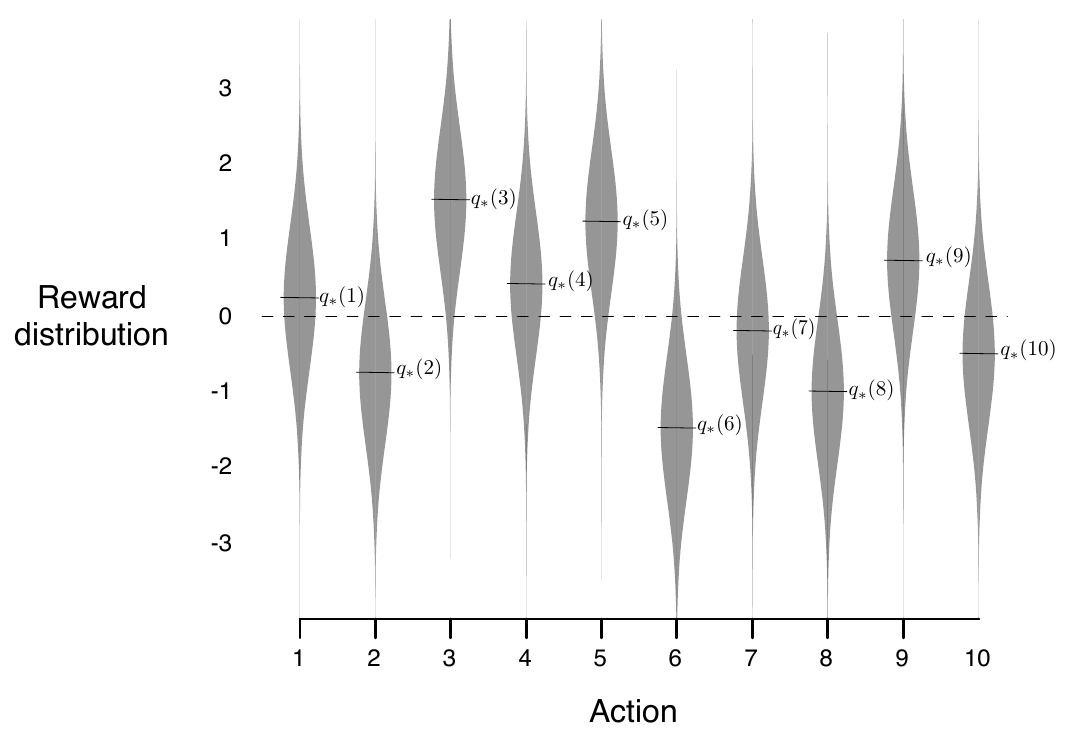
对于每一个 $A_t = a(a = 1, 2,\dots,10)$ 其 reward 都从高斯分布中选取( mean = $q_\ast (a)$, variance = 1) 对于方法的评估:对每一个 10-armed bandit problem ,在经过 1000 time steps 后,称为一轮 run ,经过独立的2000轮次后(不同 10-armed bandit problem ),得到的结果作为该方法的性能评估
结果如下:
结论:
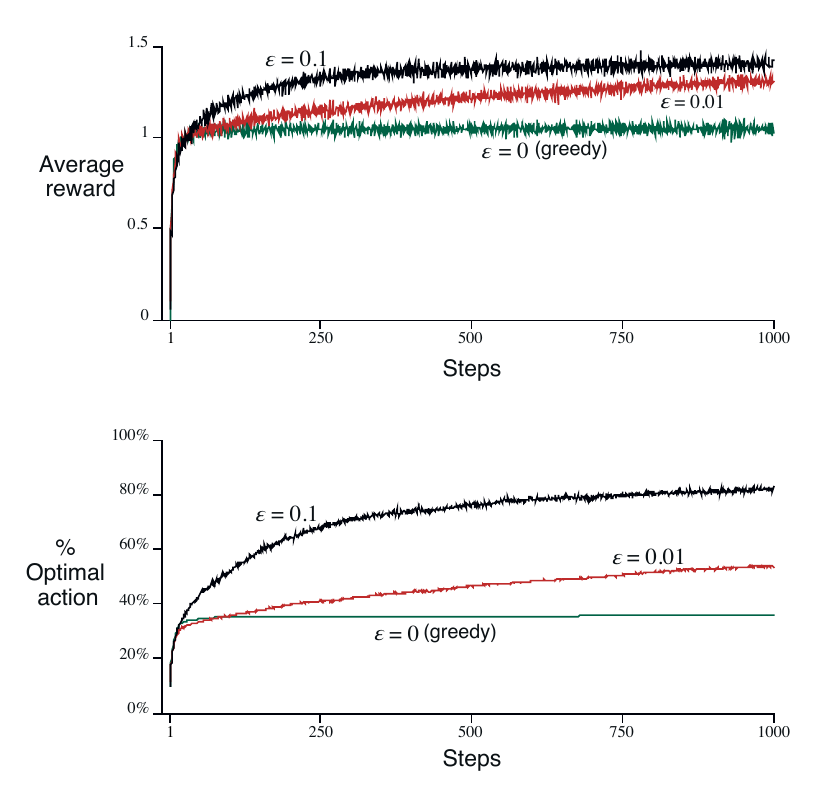
- 这张图的初始Q值是直接设置为 0 的,如果用 $Q_1(a)$ 作初值的话, optimal action 都会很快达到 $80\%$ 左右
- greedy method 在最开始时会略微地比 $\epsilon$-greedy method 快一丢丢,但是很快收敛于低水平,其 average reward 约为1,其选中最优 action 的次数大约是三分之一,表示其得到了较次的策略
对于 $\epsilon$-greedy method
- $\epsilon = 0.1$ 时,其进步较快,收敛也较快,最终 optimal action 选取率收敛于 $90\%$ 左右
- $\epsilon = 0.01$ 时,进步稍慢,收敛也稍慢,但最终表现会好过 $\epsilon = 0.1$ 的情况,理论上其最终 optimal action 选取率应为 $99\%$,糟糕的是,图上并没有显示出 $\epsilon = 0.01$ 最终的情况
- $\epsilon$-greedy method 取决于具体的任务情况,一般来说, reward 的方差大时, $\epsilon$-greedy method 会更好,如果方差为 0 ,那 $\epsilon$-greedy method 就是在单纯地做无用功
Exercise:
2.3 : $\epsilon = 0.01$ 的情况会表现最好,假设在足够长的时间后,$\epsilon = 0.1$ 和 $\epsilon = 0.01$ 都找到了最优策略,那么前者会以 $90\%$ 的概率选择 Optimal action , 而后者会以 $99\%$ 的概率选择 Optimal action ,那么显然后者带来的累计奖励更高。
2.4 Incremental Implementation
action-value methods 总是用 sample-average 来估计 values ,接下来讨论如何有效率地计算 average
针对一个 action $a$ ,令 $R_i$ 为第 $i$ 次选择 $a$ 所得的 reward ,令 $Q_n$ 为 选择 $n - 1$ 次 $a$ 后,对 $a$ 的 value 值的估计,则:
显然,不能保存下每一个 $R_i$,每次都累加计算,时间空间效率都太低,均达到了$O(n)$
显然,$Q_{n+1}$ 可以由 $Q_n$ 、$n$ 与 $R_n$ 三者计算得到 ,时间空间效率都能达到 $O(1)$ ;当然,也可以保存所有 $R$ 的累计和,但是该值会随时间增大,在 $t$ 没有极限的情况下,其有溢出的可能
上式的一般形式如下:
$NewEstimate \leftarrow OldEstimate + StepSize\ [\ Target - OldEstimate\ ]\ .$
其中 $\ [\ Target - OldEstimate\ ]$ 视作估计误差,在估计值不断接近 $Target$ 的过程中随之减小,$StepSize$ 用于随 step 变化实现 Incremental Implementation ,后面写作 $\alpha$
最后,对于 bandit problem 的简单算法如下:
2.5 Tracking a Nonstationary Problem
Nonstationary Problem : reward probabilities 不是一成不变的,而是会随时间或其它量产生变化
这种情况下,应该给最新的 reward 以高的权重,一般会改变 $\alpha$ 的值来做到这点: $Q_{n+1}\doteq Q_n+\alpha \Big[R_n-Q_n\Big]$ ,该 $\alpha$ 在前面的算法中,表现为 $1/n$ ,$\alpha \in (0, 1]$ ,$\alpha$ 越大,表示越看重新的 reward ;$\alpha$ 越小,则表明越看重之前已得到的估计。
上式表明,$i$ 越小,也就是越靠前的 $R_i$,其权重越小,因为$1-\alpha<1$; 极端情况下,即$1 - \alpha = 0$,则上式写作:$Q_{n+1} = R_n$, 这种表达称作加权平均 weighted average ,因为有:
reward 的权重以 $1 - \alpha$ 的比例呈指数性衰减,这有时被称作 exponential recency-weighted average
令 $\alpha_n(a)$ 为第 $n$ 次选择 action $a$ 时所用的 step-size parameter 。在之前的学习中,$\alpha_n(a)= 1/n$ ,这能让$Q_n$ 收敛。
但是很显然,并不是所有的 $\alpha_n(a)$ 都能让$Q_n$ 收敛,比如 $\alpha_n(a)=0.5$ 就不行。
在随机逼近理论(stochastic approximation)中,给出了保证收敛的条件:
前一个条件用于保证 steps 足够大,以排除任何初始条件或随机扰动的干扰;后一个条件保证了收敛性。
在后面的案例中,第二个条件将得不到满足,这使得 $Q_n$ 不会最终收敛于定值,而是始终受到 $R_n$ 的影响,但正如之前所提到的,在非稳定的环境中,这正是我们所需要的。
另外,满足两个条件的 $\alpha_n(a)$ 往往收敛得很慢,或者需要精心调整参数以得到一个令人满意的收敛速度。因此,这两个条件通常只用在理论工作中,在实际应用和研究中很少使用。
Exercise:
2.4:当 $\alpha$ 不为常数时,$Q_{n+1}$ 与 $R_1$~$R_n$ 的关系可表示如下:
2.5:编程题:设计并实现一个实验,用来观察在非稳定环境下 sample-average methods 的缺点。
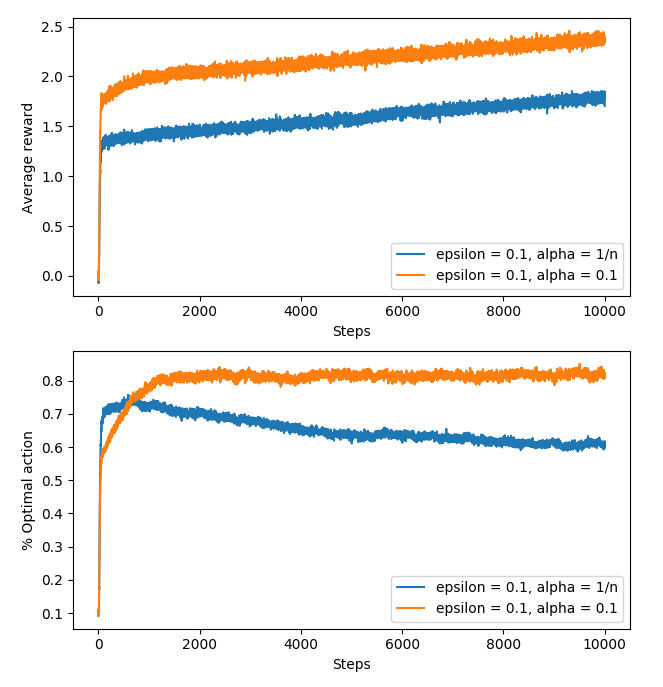
使用 10-armed testbed 的变种:所有的初始 $q_\ast (a)$ 都相等,并且每一步都分别为每一个 $q_\ast (a)$ 额外加上一个取自高斯分布的变化 ( $mean = 0\ and\ variance = 0.1$ )
使用两个方法对比: sample-average 以及 $constant\ \alpha = 0.1$;设 $\epsilon = 0.1$;画出如 2.2 的图像
结果如下图,看得出来, sample-average methods 明显劣于 constant $\alpha$
这是因为 sample-average 在 $n$ 稍大后,其 $Q$ 函数便会很快收敛,而由于环境是 nonstationary ,所以收敛的 $Q$ 函数不适用于新的环境了
而 constant $\alpha$ 中 ,新的 reward 会起到较重的作用,且 $Q$ 函数一般不收敛,所以能够跟着环境做调整
2.6 Optimistic Initial Values
前面的方法中,初始化的方法为 $Q_1(a)$,即先为每一个 $a$ 运行一次,得到其 reward 作为初始 $Q$ 值,这会给 $Q$ 函数带来偏差 bias
在 sample-average methods 中,这个偏差会很快消失;而在 constant α 中,会随着时间减小
而在实际应用中,这个偏差通常不会带来麻烦,反而在有些时候大有好处
缺点是,该参数成了一组需要人为用心挑选的参数,即使只是全设成 $0$ ;而优点则是它能很方便地一些关于所期望的奖励水平的先验知识
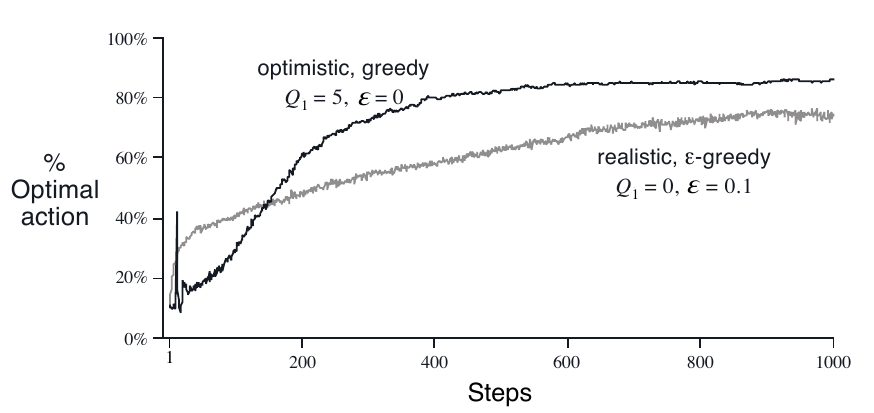
初始 $Q$ 值也可以方便地用于鼓励 explore ,比如把上面的 10-armed bandit problems 的 $Q_1(a)$ 全部设成 $+5$ ,那么在开始的时候,算法总是会得到低于 $5$ 的 reward ,$Q$ 值被更新成较小的值,那么算法就会去尝试其它的 action ,而被选中的 action 的 $Q$ 值总是被减少,也就是说 greedy-action 会不停地变化;反复如此,便能轻松地起到鼓励 explore 的作用;而在 $n$ 稍大一些时, $+5$ 的副作用便轻松的被消去了。
这种鼓励 explore 的方法称作 optimistic initial values , 在 stationary problems 可作为提高效率的小技巧
但是,在 nonstationary problems 中并不适用,因为它鼓励 explore 的作用持续很短,只要 $n$ 稍大些,初值的效果便会被消去 事实上,在一般的 nonstationary case 中,任何关于初始条件的方法均很难起到作用,包括 sample-average methods ,它也将初值视作一个特殊值,因为它对所有 rewards 的权重都是相等的。
Exercise:
2.6:Mysterious Spikes:为什么上图中,$Q_1 = 5$ 这条线的前期会有陡峭的振荡,如何优化?
实验发现,陡峭的峰点位于 $step=11$ 处,也就是说,在第11次 action 时,发生了高概率选中 optimal action 的情况;
这是因为,在前面10(本例中,$k=10$ )次选择中,没被选过的 action 的 $Q$ 值为 $5$ ,而所有被选中的 action 的 $Q$ 值都会被减小;所以前10次选择的结果都是遍历 $k$ 个 action ,因此1-10次选中 optimal action 的概率都是 $10\%$;而到了第11次选择时,因为经过了一遍遍历, optimal action 的估计值会比 non-optimal action 的估计值要以较大的概率(约 $43\%$ )高出一些,所以会增加中选概率;第12,13,14次选择都有类似的情况。而到了 14 以后, optimal action 的优势又被随机量给覆盖了(多次选择后, optimal action 突出的情况被抹消),没有了第一次选择的大优势,曲线逐渐恢复平稳。
2.7 Upper-Confidence-Bound Action Selection
之前的 explore 中, $\epsilon$-greedy methods 对于 non-greedy action 是随机选的。
upper confidence bound (UCB) 会根据 non-greedy action 的 greedy 程度来选择:
$N_t(a)$ 是 action $a$ 在 $t$ 时刻前被选过的次数,当其为 $0$ 时视 $a$ 为 greedy-action ,$c > 0$ 控制 exploration 的强度,$c$ 越大, explore 的力度越大
该方法中,平方根中的值表明了 value 估计值的不确定程度或方差;$\arg\max$ 相当于对 action value 的上界 upper bound 做一个排序,$c$ 表明了这个排序的可信度
action $a$ 被选中的次数越多,其不确定性就越小 (分母变小);相对的,随着 $t$ 的增大,没被选中的那些 action 的不确定度会增大,使用对数表明时间越往后,不确定值的增长越小,但它是无界的
在所有的 action 被选得多了后,那些 $Q$ 值小的、被选中次数多的 action ,会减少被选中的频率
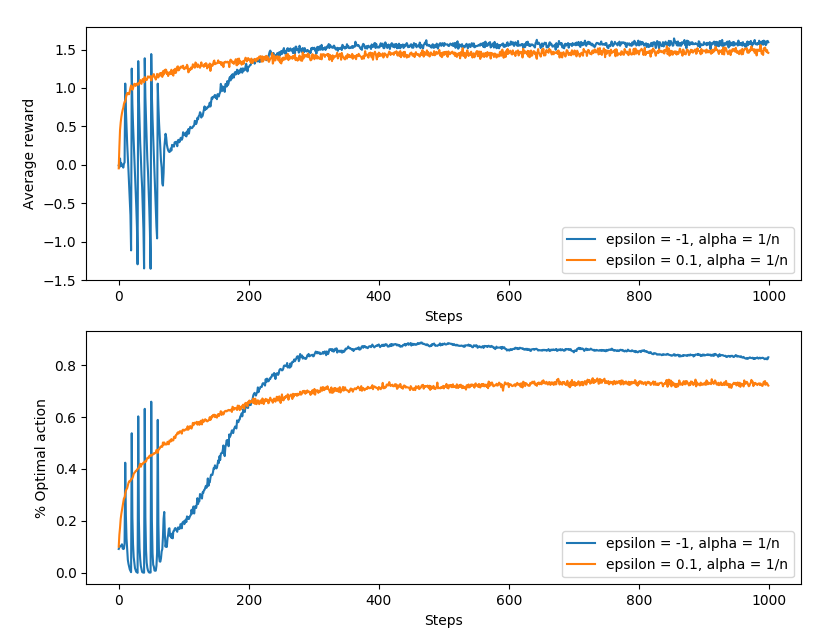
如上图,其中 $\epsilon = -1$ 的即是 UCB ,前面的抖动是在每轮遍历所有 action 后发生的:第一轮选取时,那些 $N_t(a) = 0$ 的视为 greedy-action ,因此前 $k$ 次会遍历所有 action ,到了第 $k+1$ 次时,由于所有的 $N_t(a) = 1$,因此会选中 $Q_t(a)$ 最高的那个,于是大概率选中了 optimal action ;第二轮也是类似的情况,在式中不确定值起到较大的作用,到了都遍历两轮后,便是 $Q_t(a)$ 起到较大作用,多次如此后; $N_t(a)$ 变大,不确定度变小,于是曲线趋于平稳。
UCB 虽然在本例中效果好于 $\epsilon$-greedy ,但是并不如 $\epsilon$-greedy 实用,原因在于其更难扩展到其它普遍的RL 问题中(至少在本书后面的例子中是这样的)
一是不好处理 nonstationary problems ,二是不好处理较大的状态空间,尤其是在用函数逼近的情况下;在这些情况中 UCB 并不实用
2.8 Gradient Bandit Algorithms
之前的方法都是估计一个 action values ,然后用它来选 actions ,本节会用一个 numerical preference — $H_t(a)$ 来选action:
$H_t(a)$ 越大,$a$ 被选中的概率越大,但是无法给出 $H_t(a)$ 与 reward 的关系表达
$H_t(a)$ 的值中,只有不同的 $a$ 之间的差值是有意义的,因此,使用 soft-max distribution 来选择 $a$
$\pi_t(a)$ 表示了在 $t$ 时刻选择 action $a$ 的概率,对于任意的 $a$ ,有:$H_1(a)=0$
Exercise
2.7: 说明:在仅有两个 action 的情况下,使用 soft-max distribution 与使用 logistic(sigmoid) function 是一样的
待做
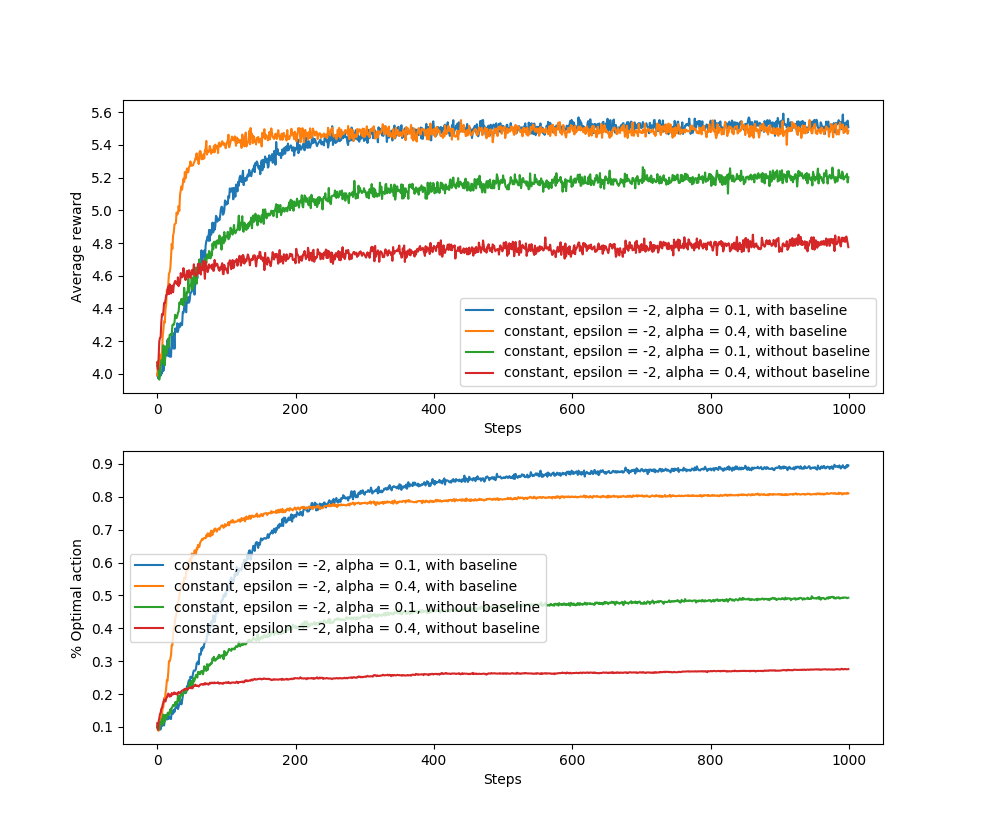
在这种 随机梯度上升 (stochastic gradient ascent) 的情形中,有一个很直觉的算法,根据每一步选中的 action $A_t$ 和所获得的 reward $R_t$ 更新所有 $H_{t+1}(a)$ :
其中, $\bar R_t\in \Bbb R$ 在 $t$ (包含)时刻以前,所有 rewards 的平均值,它作为一个 baseline 与其它 rewards 作比较。如果新的 reward 高于它,就提高 $A_t$ 的被选几率;反之则降低。 未选中的 actions 与被选中的 action 操作相反。
接下来验证上述算法是梯度上升的一种形式:
标准梯度上升的形式如下:
其中 $\Bbb E[R_t]=\sum_x\pi_t(x)q_\ast (x)$ ,虽然 $q_\ast (x)$ 并不完全可知,但是其期望值与我们接下来在式中所用的是相等的
其中 $B_t$ 即为 baseline ,其与 $x$ 无关。因为 $\sum_x\frac {\partial \pi_t(x)}{\partial H_t(a)}=0$ ,因此,加入 $B_t$ 并不会改变等式。
接下来分式上下同乘 $\pi_t(x)$ ,就得到了期望的形式:
令 $B_t = \bar R_t$ ,因为 $\Bbb E[R_t|A_t]=q_\ast (A_t)$,所以可以将 $q_\ast (A_t)$ 替换成 $R_t$ , 就得到了算法中所用的更新公式:
下面证明 $\frac {\partial \pi_t(x)}{\partial H_t(a)}=\pi_t(x)\big(\Bbb I_{a=x}-\pi_t(a)\big)$ , 其中 $\Bbb I_{a=x}$ 在 $a=x$ 时为 $1$ ,在$a\neq x$ 时为 $0$ :
首先引出分式的偏导数的标准形式:
利用该式,做以下推导:
证毕
随机梯度上升能够保证算法具有鲁棒的收敛性
注意:算法的更新不依赖于所选的动作 action ,也不依赖于奖励基线 baseline , baseline 的取值不会影响更新的结果,不过会影响到更新收敛的速度。因为梯度的期望不受 baseline 的影响,但梯度的方差受到了影响。
2.9 Associative Search (Contextual Bandits)
之前讨论的是 nonassociative tasks ,也即不需要建立状态与动作之间的联系,接下来将讨论 associative task ,需要建立从状态到最优动作之间的映射关系。
举个例子:一个新的老虎机问题:现在我们需要在 10 个老虎机问题中进行决策,这10组老虎机的 $q_\ast (a)$ 各不相同,每次随机选择一组老虎机进行选择,如果不知道或者不使用老虎机组合的编号,那么上面的方法将起不到任何作用。只有将老虎机组合的编号用上,为每组老虎机考虑不同的 action ,才能得到理想的奖励。这就是为老虎机组合的状态(编号)与对应的动作之间建立起映射关系。
Associative search taks 常被叫做 contextual bandits ,其介于简单的 k-armed banditproblem 和完全的RL问题之间,它虽然建立了状态与动作的联系,但是动作还是只影响到立即奖励,而不影响后续状态。
Exercise
2.8:如果不知道是哪一个 case ,那么无论怎么选,动作 1 和动作 2 的期望奖励都是 $0.5$ 。 而如果知道是哪一个 case ,那么在学习到 case 与 action value 之间的映射后,就能总是选到 value 更高的 action ,那么期望奖励能够达到 $0.55$
2.10 Summary
本章介绍了权衡 exploration 和 exploitation 的几个简单方法。
- $\epsilon$ methods 是以小概率随机选取 non-greedy action
- UCB methods 则是会在 explore 时偏向那些样本较少的 action 。当然,这是以 value 为基准的
- Gradient 并不估计 action values ,而是 action preferences ,
- 简单的初始化可以让算法有效地进行 explore
以上方法在 10-armed testbed 中的性能表现如下图:
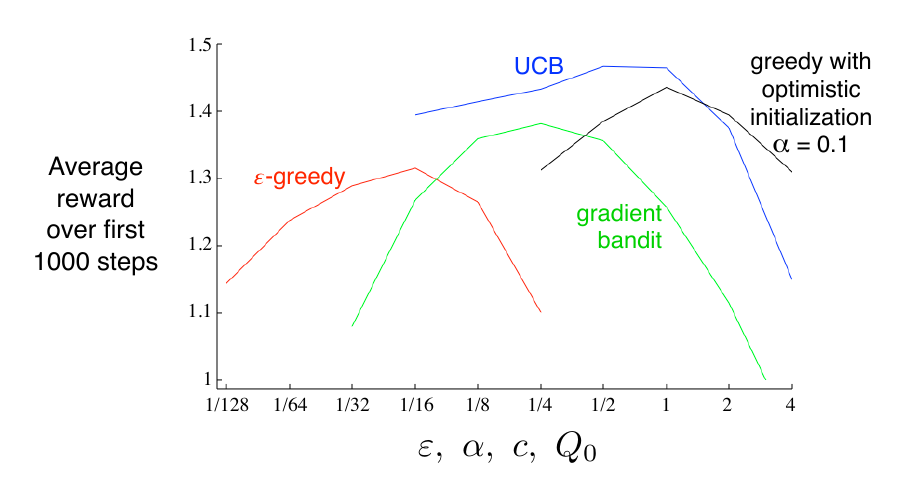
这些方法的性能都受到参数的影响,我们在考虑方法的性能时,不仅要考虑其在最优参数处表现出的性能,还要考虑方法本身对参数的敏感性。如果方法足够敏感,调参会方便些,但如果太过敏感,也许又会使其失去泛化能力和可重复性。
-
在 k-armed bandit problems 中,平衡 exploration 和 exploitation 的最有方法是 Gittins indices ,但它假设了可能问题的先验分布是已知的,而这无论在理论上还是在计算易处理性上都不能推广到完全的RL问题中。
-
贝叶斯方法假定了 action values 的一个已知的初始分布。一般来说,其更新的计算过程会非常复杂,除了某些特定的分布外( conjugate priors ),一个可能的办法是在每一步根据可能是最优动作的后验概率来选择 action 。该方法常被叫做 posterior sampling 或 Thompson sampling.
-
贝叶斯方法可想见能够达到 exploration 和 exploitation 的最优平衡。能够为所有的动作计算可能得到的立即奖励、导致的后验分布与动作值的关系。但是它的状态空间增长得太快,几乎不可能完成如此巨大的计算量,但是逼近它是有可能的。
Exercise
2.9 (programming): 给出一张类似图2.6的图,基于 Exercise 2.5 , non-stationary case ,$\epsilon$-greedy method , $\alpha=0.1$ ,每轮 $200,000$ 步,对于每一种算法-参数组,使用后 $100,000$ 步的平均奖励作为数据。
待做